















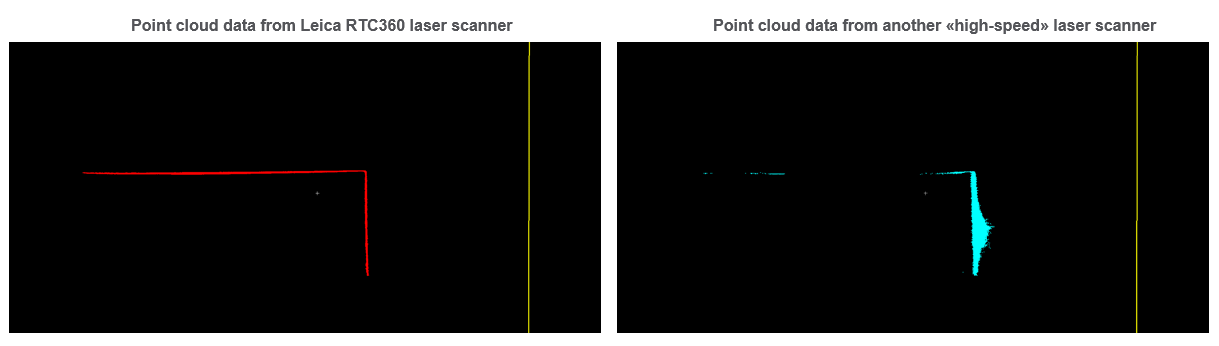
The point cloud from the Leica RTC360 is complete with low range noise and correct geometry (left). The point cloud from the other high-speed laser scanner (right) has high range noise at areas with a perpendicular incidence angle and holes in the data at areas with a flat angle of incidence. The geometry of the scanned object is also incorrect.