

















3D mobile mapping is changing the way reality is captured, visualised and analysed. The project areas that in the past would have taken weeks to digitise are now completed in a few hours within a working shift.
The technology is already being used to survey major road and rail projects, for mapping urban environments and to improve safety in power infrastructure. Leica Geosystems offers innovative capture platforms for mobile mapping and our team of experts have supported many ground-breaking customer projects around the world.
Here we answer some of the questions we are most frequently asked about technology, to help you get started with your mobile mapping journey.
1. How do you mount a mobile mapping solution on a vehicle?

You need roof bars on your vehicle to mount the capture solution. There will be different specifications for the ideal positioning of each solution. For example, for the Leica Pegasus:Swift and the Leica Pegasus:Two Ultimate, the right distance between the roof bars (centre to centre) is 400mm. The maximum width of the bars is 80mm and height is 40mm. The maximum distance between the rear mounting bracket and the back of the car must be taken into consideration. In some vehicles, the angle of the rear end may also affect this value.
2. How long does data capturing and processing take? How fast is mobile mapping?
The length of time varies depending on a few factors, including the number of cameras you are using (e.g., additional external cameras), the frame distance (i.e., number of frames), the settings used in processing (e.g., point cloud colourisation) and whether extra steps are chosen like: LAS, LGS or RCP format exports, point cloud classification, anonymization blurring process).
As an example, let’s look at a project where 25GB of raw data was captured using the Leica Pegasus:Two Ultimate, on one track with 1,750 frames for each of the 6 onboard cameras. The mission took about 45 minutes. A 360–degree camera and four side cameras were used, and the computer used met the recommended PC processing requirements. The processing involved was trajectory optimisation, point cloud and image registration – From raw data to viewable point cloud/imagery. The total time for the project was 59 minutes, so just under an hour.
3. How do you get the most accurate results when using mobile mapping?
- The satellite count is extremely important: using base station data that includes newer constellations such as Beidou, GALILEO and QZSS is the easiest way to improve trajectory quality, especially in urban environments.
- The time you spend on initialisation will pay off. The ideal initialisation is to be very static during the initial static phase, meaning no getting on/off the vehicle, no slamming doors, etc.
- We recommend that you drive at least as fast as you will be driving for data capture speed. If you plan on capturing data at 40km/h, then the dynamic should be at least 40km/h.
4. How do you get the best results in tunnels?

Using a Distance Measurement Unit (DMI) would be the obvious recommendation, but apart from that we recommend scanning the tunnel in the middle or towards the end of the mission. A simple basic rule is the longer you are driving outdoors in good satellite conditions the more reliable the Inertial Measurement Unit (IMU) data would be when you need to rely on it when there are no satellites (e.g. in a tunnel). There are diminishing returns, as the best IMU in the world would still drift, but if you are only scanning the tunnel, doing an extra-long dynamic would almost certainly give you better results than if you just did a short one and then immediately drove into the tunnel.
5. What targets should be used in mobile mapping?
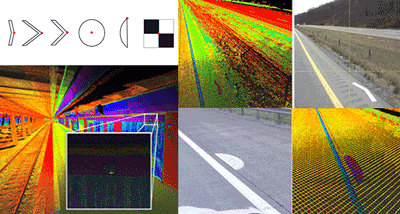
The targets must be clearly visible on the point cloud. They must have a proper diameter to be recognised, so for example, the sphere size must be significantly bigger than scanner resolution. The Leica Pegasus:Manager software can recognise chevron shapes, rectangular or cross shapes or others. The unique Automatic Target Recognition (ATR) functionality within the Pegasus:Manager software you can automatically detect the position and absolute georeferentiation of the Target points. The user should prepare 2D dwg file with shape of the target. The vehicle speed should be adopted to the number of scanlines for each sphere, so their size must be appropriately calculated for that.
Learn more about Leica Geosystems mobile mapping solutions at Leica Mobile Sensor Platforms or get in contact with us for more information.